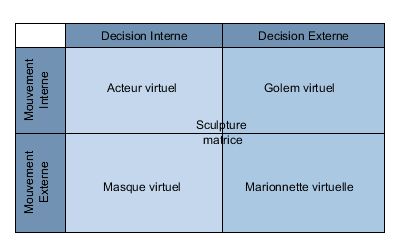
Au centre de cette classification se trouve la notion de Sculpture Matrice, ce que je présente comme une analogie numérique à la sculpture réelle. Dans cette notion de Sculpture Matrice, la géométrie numérique, contrairement à son équivalent réel, est paradoxalement conçue pour ne pas avoir une seule pose, mais pour pouvoir exprimer une multitude de poses, ce que je nomme « possibilité de mouvement ».
Cette classification est à la base de l’ensemble de ma réflexion[1] (Plessiet, Gagneré, et Sohier 2019), que ce soit dans ma pratique personnelle ou dans mes diverses collaborations. Elle me permet à la fois de m’aider dans l’élaboration conceptuelle et technologique de mes œuvres et d’outils de communication, quand je collabore avec des personnes issues du spectacle vivant.
La Marionnette Virtuelle
La Marionnette Virtuelle est une entité virtuelle dont l’origine de la décision et l’origine du mouvement sont extérieures à elle. Elle a donc besoin d’un manipulateur qui sera à l’origine du processus décisionnel et du processus moteur. De fait, sans marionnettiste, la Marionnette Virtuelle est inerte, c’est donc bien un couple marionnette / marionnettiste que nous devons considérer. Cette forme sera au cœur de mon travail à la fois sur mes portraits et mes expérimentations théâtrales.
Le Golem Virtuel
Si l’entité virtuelle est à l’origine de son propre mouvement, mais pas de son processus décisionnel, alors nous sommes en présence de ce que j’appelle un Golem Virtuel. Dans ce cas, le Golem Virtuel est capable d’exécuter des ordres, c’est-à-dire exécuter un algorithme. Mais en l’absence d’ordre, il n’aura aucune initiative propre. Il est important de noter que cette catégorie d’entité virtuelle, bien que disposant d’un nombre d’ordres bien définis, peut présenter des formes de comportements émergents. J’ai exploré ce type d’entité dans le module figurant du dispositif OutilNum, mais surtout dans mon installation artistique de réalité virtuelle Lucky 2.0.
L’acteur Virtuel
Enfin, le troisième niveau d’entité, l’Acteur Virtuel, est à l’initiative à la fois de son mécanisme décisionnel et de son mécanisme moteur. Ainsi, il est dans l’obligation de trouver ses propres solutions, à partir de ses propres observations. Pour cela, il doit être en mesure d’expérimenter en interagissant avec son environnement et de tirer des conclusions de ces interactions. En conséquence, l’Acteur Virtuel doit disposer de mécanismes d’apprentissage, afin de pouvoir tirer ses propres conclusions de ses propres observations. Ceci nous oblige à intégrer la notion d’autonomie comme définie par Tisseau (Tisseau, Parenthöen, et Harrouet 2003) dans notre réflexion. En outre, ce modèle beaucoup plus ambitieux nous oblige à intégrer dans notre architecture des mécanismes apprenants comme les réseaux de neurones ou les algorithmes génétiques. Mon œuvre en cours, La geôle, repose sur un tel agent (cf. Chapitre 3.2).
Le Masque Virtuel
La dernière forme, le Masque Virtuel, est une entité dont l’origine de la décision est interne et l’origine du mouvement est externe. Cela veut dire qu’elle ne dispose pas de capacité de mouvement. Aussi, ceci implique que le Masque Virtuel n’est pas forcément doté de « corps virtuel » capable de générer un mouvement et donc n’est pas nécessairement issu d’une Sculpture Matrice. J’utilisais des Masques Virtuels (bien qu’à l’époque je n’employais pas encore ce nom) dans le projet OutilNum derrière le concept de Smart Object. Les figurants virtuels utilisent ces outils, comme je le détaillerai dans le Chapitre 5.
[1] Plessiet Cédric, Georges Gagneré et Rémy Sohier. 2019. « A Proposal for the Classification of Virtual Character ». In HUCAPP-VISIGRAPP, 168‑ 74. Prague (République tchèque) : SCITEPRESS.